Perseverance the next rover to extend human exploration of planet Mars

Mission

(Image credits: NASA)
Perseverance rover is a very advanced rover that humans ever built and which is going explore the martian surface with its high-level science equipments. The outer look of this rover is almost identical to the curiosity rover(which is sent to mars previously to study the Martian surface or simply the previous version of perseverance) and these two rovers are almost in the size of small SUV cars but perseverance has lots of upgrades, new scientific things and also it is heavier than curiosity.
It has numerous amazing scientific instruments that help us to study the Martian surface and it also carries several high-resolution cameras and two microphones(wait what? Microphone? Yes and it is the first time we going to hear the sound of Mars). Perseverance is not alone in this trip to mars, it is carrying a companion named ingenuity which is a small helicopter, awesome isn’t it? and I am personally very excited about this because this is the first time we are going to fly a thing on another planet and it is a very tough job and its pioneering aspirations are similar to those of the Wright brothers’ Flyer, which achieved the first powered, controlled flight on Earth. The main aim of this whole mission is the search for signs of microbial life, and test technologies to help pave the way for future human exploration of Mars. The landing site of this mission is the Jezero crater.
Ok, first let's start with Perseverance's body:

The rover’s body is known as the warm electronics box (WEB) which is a strong out layer that protects the rover’s computer, electronics and instrument systems. Rover is 3 meters in length, 2.7 meters in width, and 2.2 meters in height, and the mass of the rover is 1,025 kilograms. The Perseverance rover relies on the successful design of the Curiosity but Perseverance carrying more and advance science tech than curiosity and an important difference in this rover is it has a coring drill to collect samples and the samples are sealed in tubes and placed on the surface of Mars. In the future, another mission will return these samples to Earth for detailed analysis.
A dedicated workspace is given inside the rover’s body to picking up, moving and placing drill bits and sample tubes within the Sample Caching System. Perseverance also has a larger arm than curiosity and this arm has a coring drill and two science instruments, plus a color camera for close-up surface inspection and also "selfies" for engineering health checkups. The wheels of the Perseverance rover are designed to be more robust than Curiosity. Because Curiosity's wheels were experienced some damages in the martian surface. Perseverance's wheels are narrower than Curiosity's, but bigger in diameter and made of thicker aluminum.
 (Image credits: NASA)
(Image credits: NASA)
 (Image credits: Wikimedia)
(Image credits: Wikimedia)
 (Image credits: NASA)
(Image credits: NASA)
 (Image credits: Energy)
(Image credits: Energy)
 (Image credits: Wikimedia)
(Image credits: Wikimedia)
Planetary Instrument for X-Ray Lithochemistry (PIXL) is an x-ray fluorescence spectrometer to determine the fine-scale elemental composition of Martian surface materials designed for the Perseverance rover.
Provide detailed geochemical assessment of past environments, habitability, and biosignature preservation potential. Detect any potential chemical biosignatures that are encountered and characterize the geochemistry of any other types of potential biosignatures detected. Provide a detailed geochemical basis for the selection of a compelling set of samples for return to Earth.

The Radar Imager for Mars' subsurface experiment (RIMFAX) is ground-penetrating radar. It uses radar waves to see geologic features under the surface.
It will be able to image different ground densities, structural layers, buried rocks, meteorites, and detect underground water ice and salty brine at 10 meters depth.
 (Image credits: Wikimedia)
(Image credits: Wikimedia)
The Mars Environmental Dynamics Analyzer (MEDA) is an instrument onboard Perseverance rover that will characterize the dust size and morphology, as well as surface weather.
The information obtained will help address future human exploration objectives, as dust sizes and shapes, daily weather report and information on the radiation and wind patterns on Mars.
 (Image credits: Wikimedia)
(Image credits: Wikimedia)
 (Image credits: Wikimedia)
(Image credits: Wikimedia)
 (Image credits: Wikimedia)
(Image credits: Wikimedia)
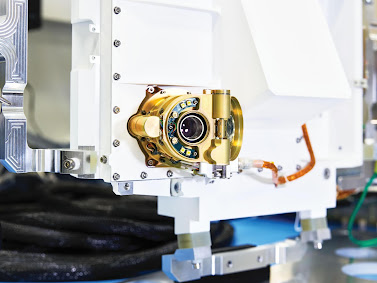
SuperCam is a suite of remote-sensing instruments that performs remote analyses of rocks and soils with a camera, two lasers, and four spectrometers to seek organic compounds that could hold biosignatures of past microbial life on Mars if it ever existed there.
 (Image credits: Wikimedia)
(Image credits: Wikimedia)
Mastcam-Z is a multispectral, stereoscopic imaging instrument.
 (Image credits: Wikimedia)
(Image credits: Wikimedia)
Scanning Habitable Environments with Raman and Luminescence for Organics and Chemicals (SHERLOC) is an ultraviolet Raman spectrometer that uses fine-scale imaging and an ultraviolet (UV) laser to determine fine-scale mineralogy, and detect organic compounds.
Assess the habitability potential of a sample and its aqueous history. Assess the availability of key elements and energy sources for life (C, H, N, O, P, S, etc.). Determine if there are potential biosignatures preserved in Martian rocks and outcrops. Provide organic and mineral analysis for selective sample caching.
The brain of Perseverance:

The rover’s brain or its computer is a crucial part and it plays a very important role. Rover’s computer module is known as Rover Compute Element (RCE) and there are two identical RCEs onboard in the rover so there is always a spare “brain”.

Perseverance uses the BAE RAD750 radiation-hardened single board computer. The computer contains 2GB of flash memory (8 times as much as spirit or opportunity rovers), 256MB of DRAM(Dynamic random access memory), and 256KB of EEPROM (Electrically erasable programmable read-only-memory) and it operates at up to 200 megahertz speed which is 10 times the speed in Spirit and Opportunity’s computer. The computers of perseverance have a special memory that can tolerate the extreme radiation environment in space and in mars.
The computers register signs of health(temperature and power levels, etc) as the human brain. This main control loop continuously checks the current state of the system to ensure that the rover is both able to communicate throughout the surface mission and that it remains thermally stable (not too hot or too cold). Activities such as taking pictures, driving, and operating the instruments are performed under commands transmitted in a command sequence to the rover from the flight team back on Earth. The other computer or brain of the rover is normally asleep but if something went wrong with the first one then it will take over the control and continue the mission.
The software of Perseverance also has improvements than curiosity. Perseverance should manage the daily tasks more efficiently to balance its on-site science measurements while also collecting samples for potential future analysis. For this operation, the software of Perseverance will give greater independence than the curiosity ever had. This helps the rover to cover more area without getting commands from the earth so frequently and it also has a “simple planner” in its software which allows more effective and autonomous use of electrical power and other rover resources.
Then, what about communication?
Perseverance has three antennas Ultra-High Frequency Antenna(UHF), X-Band High-Gain Antenna, and X-Band Low Gain Antenna.
UHF is used for communication between the ground station and rover through NASA's other Mars orbiters. It is easier for the rover to communicate with the orbiters because they are closer than the Deep Space Network (DSN) antennas on Earth and the orbiters then use their much larger antennas and transmitters to relay that data on the long-distance link back to Earth. The Radiofrequency of UHF is about 400 megahertz and the transmission rate is up to 2 megabites per second on the rover-to-orbiter relay link.
The X-Band High Gain antenna is steerable so it can point its radio beam in a specific direction. The benefit of having a steerable antenna is that the entire rover doesn't need to change position to talk to Earth, which is always moving in the Martian sky. Its high gain allows it to focus its beam, allowing higher data rates on the long link back to Earth. The main job of this antenna to transmitting data to and receives data from Earth. Radiofrequency is about 7 to 8 gigahertz. The transmission rate is 160/500 bits per second or faster to/from the Deep Space Network's 112-foot-diameter (34-meter-diameter) antennas or at 800/3000 bits per second or faster to/from the Deep Space Network's 230-foot-diameter (70 meter-diameter).
X-Band Low Gain Antenna is mainly used for receiving data from the earth. The antenna transmits at low data rate to the Deep Space Network antennas on Earth. Because it doesn’t need to be pointed, it provides a robust way to always communicate with the rover. Radiofrequency is about 7 to 8 gigahertz. The transmission rate is Approximately 10 bits per second or faster from the Deep Space Network's 112-foot-diameter (34-meter-diameter) antennas or approximately 30 bits per second or faster from the Deep Space Network's 230-foot-diameter (70-meter-diameter) antenna.
The power source of the rover

Electrical power is essential for all the activities that the rover does. Perseverance carries a radioisotope power system. This power system produces electricity using the heat which is released by the plutonium's radioactive decay.

The power source is called Multi-Mission Radioisotope Thermoelectric Generator or MMRTG by Aerojet Rocketdyne. This uses Plutonium-283 oxide which will give off heat by its natural decay and this heat will be converted into electricity which powers the rover and also this heat helps the rover to maintain the correct operating temperature. The MMRTG is 64 cm in diameter by 66 cm long and has a mass of 45 kg. It uses 4.8 kg of Plutonium as the source of the steady supply of heat. The electrical power produced about 110 Watts at launch, declining a few percent per year. The MMRTG charges two lithium-ion rechargeable batteries which power the rover's activities and must be recharge periodically. MMRTG gives the rover greater mobility over a large range of latitudes and altitudes. This power system is almost similar to that of Curiosity. The operational lifetime of MMRTG is 14 years which is way higher than the mission duration of three years.
Scientific instruments
PIXL

RIMFAX

(Image credits: Wikimedia)
MEDA

MOXIE

Mars Oxygen ISRU Experiment (MOXIE) is an exploration technology experiment that will produce a small amount of pure oxygen from Martian atmospheric carbon dioxide (CO2) in a process called solid oxide electrolysis.
The main objective of this instrument to convert the CO2 (which makes up 96% of the Martian atmosphere) to O2 which will be used by humans to breathe and also used as an oxidizer for rockets.
SuperCam


MastCam-Z

Characterize the overall landscape geomorphology, processes, and the nature of the geologic record (mineralogy, texture, structure, and stratigraphy) at the rover field site. Assess current atmospheric and astronomical conditions, events, and surface-atmosphere interactions and processes. Provide operational support and scientific context for rover navigation, contact science, sample selection, extraction, and caching, and the other selected Mars-2020 investigations.
SHERLOC

Ingenuity, the Mars helicopter

Ingenuity is a tiny helicopter that is going to fly on mars and it is a technology demonstrator so it won't carry any scientific instrument to study mars. The main aim of Ingenuity is to demonstrate rotorcraft flight in the extremely thin atmosphere of Mars. One of Ingenuity’s first objectives, when it gets to the Red Planet, is just to survive the frigid Martian night for the first time. Ingenuity is designed to be light, with rotor blades that are much larger and spin much faster than what would be required for a helicopter of Ingenuity’s mass on Earth.
Ingenuity will attempt up to five test flights within a 30-Martian-day (31-Earth-day) demonstration window.

Humans can't control the helicopter because there is a communication delay between the ground station and the helicopter due to the more distance between earth and mars. So, most of the work should be done autonomously by the helicopter and this is a very challenging job for ingenuity. Solar array on top of the rotor system charges six lithium-ion batteries. Four specially made carbon fiber blades arranged into two 1.2-meter-long counter-rotating rotors that spin at roughly 2,400 rpm.

Fuselage (body) dimensions:13.6 centimeters by 19.5 centimeters by 16.3 centimeters; four carbon composite landing legs, each 0.384 meters long, giving the helicopter about 5 inches 13 centimeters of clearance above the ground. Height is 0.49 meters.
There are two cameras onboard in Inguinity, one is color with a horizon-facing view for terrain images and the other is black-and-white
for navigation.
Ingenuity uses Qualcomm Snapdragon processor as its main computer with Linux operating system. Among other functions, this controls the visual navigation algorithm via a velocity estimate derived from features tracked with a camera. The Qualcomm processor is connected to two flight-control microcontroller units (MCUs) to perform the needed flight-control functions. It will communicate with the rover through a radio link using low-power Zigbee communication protocols, implemented via 900 MHz SiFlex 02 chipsets mounted in both the rover and helicopter.
Where can I watch this live landing?
You can watch this from NASA's :

Comments
Post a Comment